Разработка учебных проектов моделей подвижных автоматических систем наземного и воздушного размещения с использованием СПО (Владимир Симонов, OSEDUCONF-2023) — различия между версиями
Материал из 0x1.tv
StasFomin (обсуждение | вклад) |
StasFomin (обсуждение | вклад) |
||
== Thesis ==
Разработка наземных и воздушных беспилотных транспортных средств предусматривает обязательное создание действующих
макетов и прототипов для оценки конструкции и её отработки в лабораторных условиях, на испытательных стендах, полигонах
и т.д. При этом модели создаются в САПР, в натурном виде и т. д. Для студентов, обучающихся по направлениям подготовки
«Информатика и вычислительная техника», «Управление в технических системах», в особенности для авиационных
специальностей участие в таких работах особенно актуально.
Проектирование моделей подвижных автоматических систем наземного и воздушного размещения осуществляется с использованием
СПО. Эффективно использование популярных и недорогих аппаратно-программных средств на базе Arduino, Raspberry Pi, а
также соответствующих компонент.
Достаточно важным здесь при обучении студентов является разработка закона управления созданным макетом, в особенности
управление движением макета. Простейший закон управления — релейный — не всегда приводит к положительному результату,
если объект обладает динамическими свойствами. Этапы синтеза системы управления являются классическими<ref name="d1">Дорф Р. <i>Современные системы управления</i> / Р. Дорф, Р. Бишоп. Пер. с англ. Б. И. Копылова. — М.: Лаборатория Базовых Знаний, 2002 — 832 с.</ref>:
* определение целей управления;
* выбор переменных, подлежащих управлению;
* формулировка требований к этим переменным;
* выбор конфигурации системы и исполнительного устройства;
* получение моделей объекта управления, датчиков и исполнительных устройств;
* выбор регулятора и определение ключевых параметров, подлежащих настройке;
* оптимизация параметров и анализ качества системы (при необходимости возврат к выбору конфигурации системы и
исполнительного устройства);
Если качество системы приемлемое, процедура синтеза завершается.
В РГСУ в рамках изучения дисциплин, связанных с проектированием информационных систем, создаются и исследуются
соответствующие модели подобных систем <ref name="d2">Практические аспекты организации занятий по основам программирования в области электроники, автоматики и робототехники при подготовке бакалавров и специалистов инженерных специальностей / Миронов П. Н., Герус М. И., Аметова М. М. и др. — В сборнике: Инфорино-2018. Материалы IV Международной научно-практической конференции. 2018. С.~155—159.</ref>.
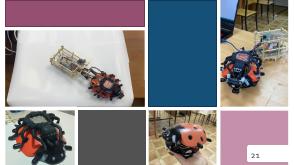
Так, разработан действующий макет средства автономной перевозки грузов. Цель разработки состояла не только в
проектировании собственно устройства, но и в пробуждении интереса к электронике и робототехнике у обучающихся,
посетителей дней открытых дверей вуза, и, кроме того, не создать отторжения из-за сложности проекта. Для достижения
поставленной цели практически все соединения, сенсоры, моторы и прочие элементы должны быть по возможности видны, а
также и «мозг» — плата обработки информации. Поэтому большая часть корпуса выполнялась вручную, придан яркий и
необычный дизайн. Здесь используются датчик линий, не дающий выехать из заданной зоны и предотвращающий падения со
стола; датчик дистанции, предотвращающий столкновение с препятствиями; оптико-электронный модуль (датчики
освещённости), отвечающий за наведение на источник освещения. Устройство имеет три состояния:
* покой: при отсутствии освещения или при избыточном освещении;
* движение вперёд: скорость движения зависит от датчиков освещённости; повороты осуществляются при определённой разнице в показаниях левого и правого датчиков освещённости (функция наведения на источник освещения);
* движение назад — при обнаружении препятствии или близости к краю допустимой зоны (например, край стола).
Важную роль играла наглядность макета, поэтому каждое из состояний сопровождалось символами, выводимыми на LED-матрицу,
размещённую на видном месте в верхней части макета.
Разработана также модель тренажёра взлёта посадки вертолётного типа. Цель разработки: обучение студентов разработке
модели, обладающей динамическими свойствами, а также закона управления. Цель управления здесь состояла в получении
приемлемых переходных характеристик для трёх режимов: (а) — взлёта и поддержания заданной высоты; (б) —
стабилизации высоты при нагружении и (в) — при освобождении от груза. Переменные, подлежащие управлению: скорость
вращения воздушных винтов, которая зависит не только от показаний высотомера (ультразвукового дальномера), но и
соответствует предельным значениям напряжения питания. При этом конструкция проектировалась таким образом, чтобы
развивается требуемая подъёмная сила. Использовался закон регулирования типа ПИ (пропорционально — интегральный).
Проведена оптимизация параметров системы, оценено качество.
Таким образом, представлены результаты разработки учебных проектов моделей подвижных автоматических систем наземного и
воздушного размещения с использованием СПО (Wiring, платформа Arduino). Определены области использования разработок;
поставлены цели управления; выделены переменные, подлежащие управлению с определением допустимых значений; выбрана
конфигурация систем (сенсоры, исполнительные устройства, вычислители, согласующие звенья) и законы управления;
оптимизированы параметры системы, оценено качество функционирования. В итоге, разработано несколько макетов, среди
которых автоматическое устройство перевозки грузов, движущееся по поверхности, реагирующее на препятствия, следующее за
источником света и имеющее несколько режимов функционирования и индикации режимов; тренажёр взлёта-посадки вертолётного
типа, осуществляющий стабилизацию высоты полёта, принимающий нагрузку на борт и освобождающийся от полезной нагрузки.
Получены и оценены реальные характеристики функционирования моделей. Полученные результаты удовлетворяют поставленным
требованиям.
* https://github.com/Flattershaine
{{----}}
[[File:{{#setmainimage:Разработка учебных проектов моделей подвижных автоматических систем наземного и воздушного размещения (OSEDUCONF-2023)!.jpg}}|center|640px]]
{{LinksSection}}
<!-- <blockquote>[©]</blockquote> -->
<references/>
[[Категория:OSEDUCONF-2023]]
[[Категория:Draft]]
[[Категория:СПО в образовании]] | |||
Версия 20:55, 23 февраля 2024
- Докладчик
- Владимир Симонов


Разработаны учебные проекты моделей автоматических систем, осуществляющих движение по поверхности и в воздухе. Синтезированные законы управления позволяют системам избегать препятствий, поддерживать направление движения в сторону объекта, обеспечивать требуемые режимы движения с заданным качеством. В разработке использовалось свободное программное обеспечение
Содержание
Видео
Презентация


















Thesis
Разработка наземных и воздушных беспилотных транспортных средств предусматривает обязательное создание действующих макетов и прототипов для оценки конструкции и её отработки в лабораторных условиях, на испытательных стендах, полигонах и т.д. При этом модели создаются в САПР, в натурном виде и т. д. Для студентов, обучающихся по направлениям подготовки «Информатика и вычислительная техника», «Управление в технических системах», в особенности для авиационных специальностей участие в таких работах особенно актуально.
Проектирование моделей подвижных автоматических систем наземного и воздушного размещения осуществляется с использованием СПО. Эффективно использование популярных и недорогих аппаратно-программных средств на базе Arduino, Raspberry Pi, а также соответствующих компонент.
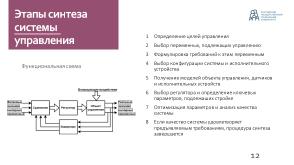
Достаточно важным здесь при обучении студентов является разработка закона управления созданным макетом, в особенности управление движением макета. Простейший закон управления — релейный — не всегда приводит к положительному результату, если объект обладает динамическими свойствами. Этапы синтеза системы управления являются классическими[1]:
- определение целей управления;
- выбор переменных, подлежащих управлению;
- формулировка требований к этим переменным;
- выбор конфигурации системы и исполнительного устройства;
- получение моделей объекта управления, датчиков и исполнительных устройств;
- выбор регулятора и определение ключевых параметров, подлежащих настройке;
- оптимизация параметров и анализ качества системы (при необходимости возврат к выбору конфигурации системы и
исполнительного устройства);
Если качество системы приемлемое, процедура синтеза завершается.
В РГСУ в рамках изучения дисциплин, связанных с проектированием информационных систем, создаются и исследуются соответствующие модели подобных систем [2].
Так, разработан действующий макет средства автономной перевозки грузов. Цель разработки состояла не только в проектировании собственно устройства, но и в пробуждении интереса к электронике и робототехнике у обучающихся, посетителей дней открытых дверей вуза, и, кроме того, не создать отторжения из-за сложности проекта. Для достижения поставленной цели практически все соединения, сенсоры, моторы и прочие элементы должны быть по возможности видны, а также и «мозг» — плата обработки информации. Поэтому большая часть корпуса выполнялась вручную, придан яркий и необычный дизайн. Здесь используются датчик линий, не дающий выехать из заданной зоны и предотвращающий падения со стола; датчик дистанции, предотвращающий столкновение с препятствиями; оптико-электронный модуль (датчики освещённости), отвечающий за наведение на источник освещения. Устройство имеет три состояния:
- покой: при отсутствии освещения или при избыточном освещении;
- движение вперёд: скорость движения зависит от датчиков освещённости; повороты осуществляются при определённой разнице в показаниях левого и правого датчиков освещённости (функция наведения на источник освещения);
- движение назад — при обнаружении препятствии или близости к краю допустимой зоны (например, край стола).
Важную роль играла наглядность макета, поэтому каждое из состояний сопровождалось символами, выводимыми на LED-матрицу,
размещённую на видном месте в верхней части макета.
Разработана также модель тренажёра взлёта посадки вертолётного типа. Цель разработки: обучение студентов разработке модели, обладающей динамическими свойствами, а также закона управления. Цель управления здесь состояла в получении приемлемых переходных характеристик для трёх режимов: (а) — взлёта и поддержания заданной высоты; (б) — стабилизации высоты при нагружении и (в) — при освобождении от груза. Переменные, подлежащие управлению: скорость вращения воздушных винтов, которая зависит не только от показаний высотомера (ультразвукового дальномера), но и соответствует предельным значениям напряжения питания. При этом конструкция проектировалась таким образом, чтобы развивается требуемая подъёмная сила. Использовался закон регулирования типа ПИ (пропорционально — интегральный). Проведена оптимизация параметров системы, оценено качество.
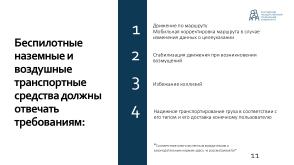
Таким образом, представлены результаты разработки учебных проектов моделей подвижных автоматических систем наземного и воздушного размещения с использованием СПО (Wiring, платформа Arduino). Определены области использования разработок; поставлены цели управления; выделены переменные, подлежащие управлению с определением допустимых значений; выбрана конфигурация систем (сенсоры, исполнительные устройства, вычислители, согласующие звенья) и законы управления; оптимизированы параметры системы, оценено качество функционирования. В итоге, разработано несколько макетов, среди которых автоматическое устройство перевозки грузов, движущееся по поверхности, реагирующее на препятствия, следующее за источником света и имеющее несколько режимов функционирования и индикации режимов; тренажёр взлёта-посадки вертолётного типа, осуществляющий стабилизацию высоты полёта, принимающий нагрузку на борт и освобождающийся от полезной нагрузки. Получены и оценены реальные характеристики функционирования моделей. Полученные результаты удовлетворяют поставленным требованиям.
!.jpg)
Примечания и ссылки
- ↑ Дорф Р. Современные системы управления / Р. Дорф, Р. Бишоп. Пер. с англ. Б. И. Копылова. — М.: Лаборатория Базовых Знаний, 2002 — 832 с.
- ↑ Практические аспекты организации занятий по основам программирования в области электроники, автоматики и робототехники при подготовке бакалавров и специалистов инженерных специальностей / Миронов П. Н., Герус М. И., Аметова М. М. и др. — В сборнике: Инфорино-2018. Материалы IV Международной научно-практической конференции. 2018. С.~155—159.