Kotlin для роботов — это функционально! (Роман Белков, SECR-2015) — различия между версиями
Материал из 0x1.tv
StasFomin (обсуждение | вклад) |
StasFomin (обсуждение | вклад) (Batch edit: replace PCRE \{\{youtubelink\|([^\}]*)\}\} with {{youtubelink|\1}}{{letscomment}}) |
||
== Видео ==
{{vimeoembed|143682986|800|450}}
{{youtubelink|_vW9P4IC6-A}}{{letscomment}}
== Слайды == | |||
Версия 16:59, 19 октября 2018
Содержание
Аннотация
- Докладчик
- Роман Белков


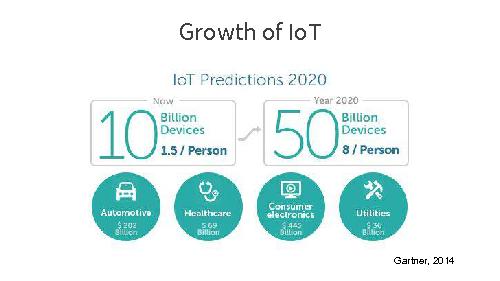
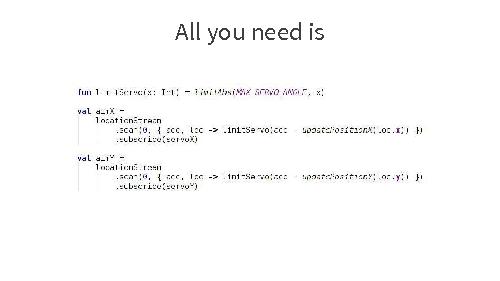
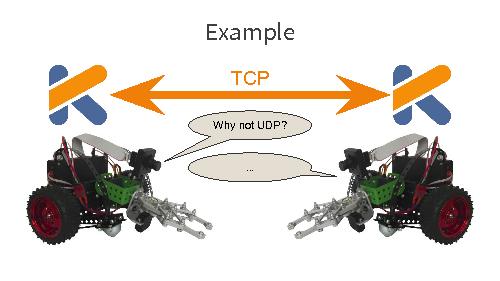
В докладе представлен опыт по дизайну библиотеки на языке Kotlin для JVM (Java 8 SE Embedded for ARM) на робототехническом контроллере TRIK. Будет рассказано о создании библиотеки, ориентированной на программирование роботов и устройств эры “Интернета вещей”, полностью написанной на Kotlin для использования с JVM-кодом на контроллерах.
Думаю, слушателям было бы интересно узнать о том, как внедрение популярных высокоуровневых технологий, изначально не предназначенных для робототехники, открывает новые возможности как для разработчиков устройств, так и для использования в образовании.
Видео
Посмотрели доклад? Понравился? Напишите комментарий! Не согласны? Тем более напишите.
Слайды




Примечания и отзывы
Plays:291 Comments:0