Электромиографическое распознавание биопотенциалов человека (Вадим Шамонин, OSSDEVCONF-2017)
- Докладчик
- Вадим Шамонин


В докладе представлен открытый аппаратно-программный проект для распознавания электромиографических сигналов человека.
В основе аппаратной части задействована платформа Arduino, которая принимает данные от накожных датчиков и передаёт в принимающее программное обеспечение для обнаружения и классификации мышечной активности.
Рассмотрены результаты апробации системы при распознавании движений пальцев рук. Обсуждаются особенности применения разработки для управления исполнительными устройствами, а также в качестве источника информации для диагностического оборудования.
Содержание
Видео
Презентация







Thesis
Метод поверхностной (неинвазивной) электромиографии заключается в исследовании биоэлектрической активности мышц, регистрируемой с помощью помещаемых на кожу поверхностных электродов. ЭМГ-сигнал, снимаемый с таких электродов, содержит осцилляции различной амплитуды, частоты и периодичности (от 100-150 мкВ до — 100-3000 мкВ в зависимости от степени сокращения мышцы, состояния и возраста подопытного и др. факторов).
Электромиографические исследования мышечной активности человека проводились с начала XX века; однако применение компьютерного анализа электромиограмм, их автоматической классификации и распознавания в сочетании с относительной простотой регистрации делает данные методы актуальными за пределами чисто медицинской сферы применения. Выделение в ЭМГ-сигнале паттернов, характерных для напряжения конкретных мышц, может использоваться для создания средств управления виртуальной реальностью, мониторинга физической активности человека, при создании различных вспомогательных устройств и др.
Несмотря на широкие возможности ЭМГ, существующие в настоящее время коммерческие устройства рассчитаны на узкое применение, а их производители не заинтересованы в свободном распространении и более универсальном применении своих наработок. Это послужило причиной создания данного аппаратно-программного проекта, доступного, благодаря принципам открытого аппаратного и программного обеспечения, для развития заинтересованными разработчиками и различных альтернативных применений. Наработки проекта доступны по адресу [1].
Основой для разработки устройства послужила платформа Arduino. При помощи неё данные обрабатываются при подключении к ПК. Для более точного выявления биопотенциалов используется специализированный OpenHardware-модуль цифрового усиления сигналов muscle sencor v3, позволяющий фиксировать электрическую активность мышц при помощи стандартных накожных Ag{}-электродов (рис. «Схема подключения усилителя биопотенциалов, вид используемых накожных электродов Ag/AgCl и точки их крепления»), широко используемых в медицинских целях при записи ЭКГ.
-r1.png)
Разработка программной подсистемы, отвечающей за распознавание сигналов, была проведена на задаче применения движений
пальцев рук в качестве источника управляющих сигналов. Применение ЭМГ в данном случае делает возможным как создать
более удобный аналог перчаток виртуальной реальности (датчики крепятся на предплечье, оставляя кисть свободной), а
также перспективно в области реабилитации пациентов после инсультов и нейротравм.
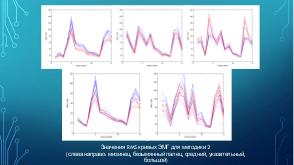
Практическим методом была установлена взаимосвязь амплитуды получаемого сигнала на конкретном участке мышцы от степени сгибания пальцев руки. Были опробованы две методики регистрации сигналов. В рамках 1-й методики положения №4 и №5, также как и №6 и №7 регистрировались одним электродом (рис.~1). Сигналы записывались относительно канала Reference, положение которого выбиралось на участке выше локтя, на котором отсутствуют сокращения мышц при движении пальцами. В рамках второй методики те же положения регистрировались отдельными электродами, при положении канала Reference таком же, как в 1-й методике, а кроме того, снимались 5 дифференциальных каналов между положениями 1 и 2; 3 и 4; 5 и 6; 7 и 8; 9 и 10. В результате методика позволила улучшить отношение сингал/шум, что обеспечило существенно лучшее качество распознавания движений. Пример распознавания сигналов приведен на рис. «Распознавание движений мизинца (слева) и указательного пальца (справа)».
-r2.png)
Отметим, что использование некоторых каналов не улучшает работу классификатора. Для 2-й методики достаточно использовать
5 дифференциальных и 2 отдельных канала. В результате проверки выбранных методик измерения были получены 65% и 95%
вероятности правильного определения сгибания пальца 1-й и 2-й методик соответственно. Время работы наиболее
удовлетворительного алгоритма классификации составляет 0,5 мс, что позволяет применять его в режиме реального времени.
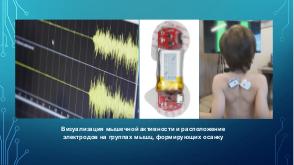
В данный момент на основе emgdump ведётся разработка устройства контроля осанки. После установки электродов в районе мышц, отвечающих за поддержание осанки, фиксируются значения ЭМГ-сигналов в крайних (согнутом и выпрямленном) положениях. Далее задаётся интервал значений, при котором осанка является удовлетворительной. Таким образом, при расслаблении мышц значение электромиограммы выходит за пределы допустимых, после чего срабатывает звуковой сигнал или вибромотор.
Рис. 3. Визуализация мышечной активности и расположение электродов на группах мышц, формирующие осанку

Примечания и ссылки
!.jpg)
Plays:404 Comments:0