Реализация алгоритмов навигации БПЛА с использованием ROS (Илья Никляев, SECR-2015) — различия между версиями
Материал из 0x1.tv
StasFomin (обсуждение | вклад) |
StasFomin (обсуждение | вклад) |
||
== Примечания и отзывы ==
<!-- <blockquote>[©]</blockquote> -->
* [http://2015.secr.ru/lang/ru/program/submitted-presentations/development-of-uav-navigation-algorithm-with-use-of-ros Страница доклада на сайте конференции]
<references/>
[[Category:SECR-2015]] <!-- -->
[[Категория:Алгоритмы]]
[[Категория:Робототехника]]
{{stats|disqus_comments=053|refresh_time=2017-11-11T00:39:46.54387824T20:50:25.241733|youtube_plays=54|vimeo_plays=98|youtube_comments=0|}}vimeo_comments=0}} | |||
Версия 17:50, 24 ноября 2017
Содержание
Аннотация
- Докладчик
- Илья Никляев


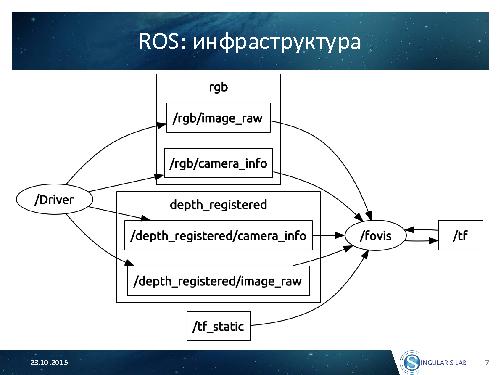
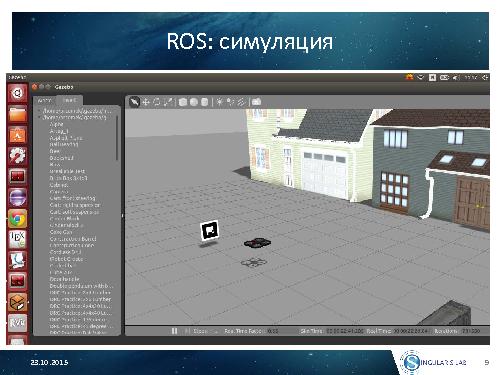
В рамках данного доклада освещается подход к разработке программного обеспечения роботов с использованием фреймворка ROS на примере алгоритмов навигации беспилотного летательного аппарата. Несмотря на то, что парадигма программирования под ROS несколько отличается от классических подходов к программированию, она набирает всё большую популярность среди разработчиков программного обеспечения роботов.
Видео
Слайды



Примечания и отзывы
Plays:152
Comments:0