Open Source Robotics в России и не только — практики, инструменты, опыт, перспективы (Игорь Брылёв, OSSDEVCONF-2025)
Материал из 0x1.tv
- Докладчик
- Игорь Брылёв


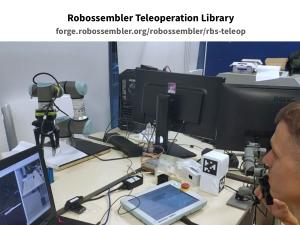
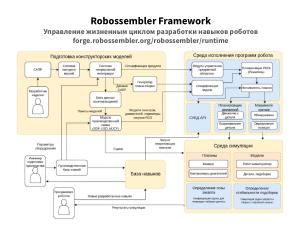
Доклад посвящён теме свободной разработки промышленных и образовательных роботов на примере опыта, полученного в рамках проекта Robossembler.
- Затрагиваются вопросы, связанные с открытыми инструментами проектирования робототехнических комплексов и их компонентов.
- Анализируется опыт международных сообществ вокруг робототехники (ROS) и перспективы их появления в России.
Содержание
Видео
Презентация
































Thesis
Ключевые слова: робототехника, аппаратное обеспечение.
Современные роботы являются частным случаем кибер-физических систем, отличающихся высокой степенью интеграции компонентов и сложностью архитектуры, поэтому движение Open Robotics имеет прямое отношение к движению Open Hardware. В отличие от сферы Open Source Software (OSS), которая стала неотъемлемой частью ИТ-индустрии, открытые аппаратные решения развиваются значительно медленнее. Ключевыми драйверами развития этой отрасли являются доступность средств производства, развитие инструментария разработки и стандартизация.
Доступность средств производства
Программное обеспечение, несмотря на виртуальную природу, воплощается в материальном мире с помощью компьютера и программы компилятора, где исходный код выступает де-факто в роли чертежа. Массовое распространение персональных компьютеров создало предпосылки для развития OSS. Для аппаратных средств аналогом компьютера являются станки. Развитие Open Hardware коррелирует с децентрализацией и снижением стоимости таких средств. Публикация чертежей сложного оборудования, например, литографа или спутника, не имеет смысла без доступа к соответствующему производству. Таким образом, open source и децентрализация производства тесно взаимосвязаны.
Положительной тенденцией тут является рост доступности 3D-печати. Снижение стоимости и повышение качества печати способствует популяризации Open Hardware. В проекте Robossembler использование 3D-печати позволило разработать такие компоненты как прецессирующий редуктор и станок для намотки статоров.
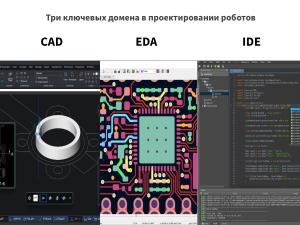
Средства разработки
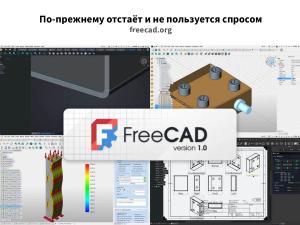
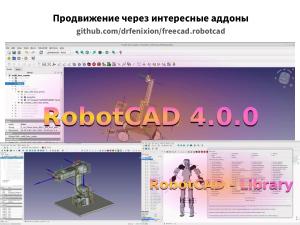
Проектированию предшествует этап разработки изделия, где пока сохраняется наследие проприетарных систем. Традиционные инженерные САПР представляют собой монолитные системы с закрытыми геометрическими ядрами и системами управления данными. Опыт перехода на открытые альтернативы, такие как FreeCAD, несёт сложности, связанные с необходимостью переобучения команды и более низким качеством инструмента по сравнению с коммерческими аналогами (Solidworks, Компас). Однако ситуация меняется: FreeCAD недавно получил коммерческую поддержку, развиваются специализированные модули (OSHAutoDoc, RobotCAD), способствующие его популяризации.
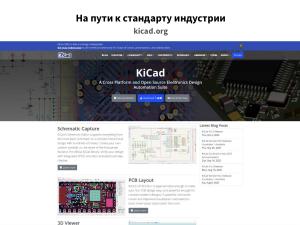
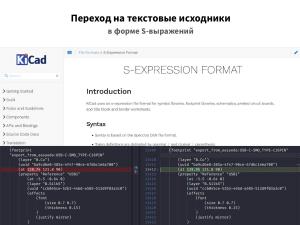
В области разработки электроники открытая система KiCAD достигла уровня проприетарных аналогов (включая Altium Designer) для большинства задач. KiCAD использует текстовые форматы хранения данных, что обеспечивает совместимость с Git и поддержку практик CI/CD.
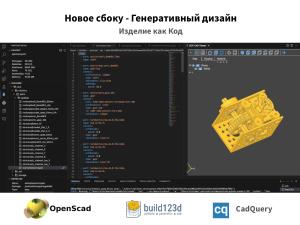
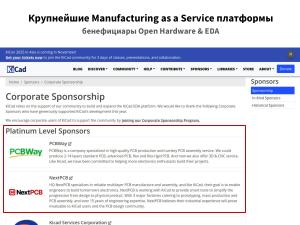
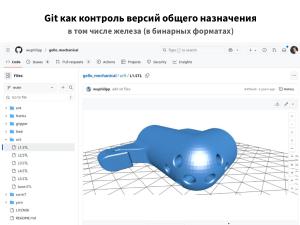
Инфраструктурной основой программной разработки выступают платформы типа GitHub, которые берут на себя большую часть функций жизненного цикла ПО. Для аппаратных средств такой инфраструктурой является само производство и специализированные платформы обмена моделями (GrabCAD). На этапе проектирования любое изделие является данными или программой, что позволяет использовать стандартные инструменты: Git, CI/CD, пакетные менеджеры.
Стандартизация интерфейсов и данных
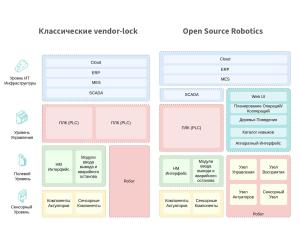
Критическое значение имеет стандартизация данных и интерфейсов. В отличие от монолитных PLM-систем, в разработке ПО для поддержки жизненного цикла используется экосистема из открытых инструментов (Git, Jenkins, Docker, Kubernetes), что стало возможным благодаря строгой стандартизации.
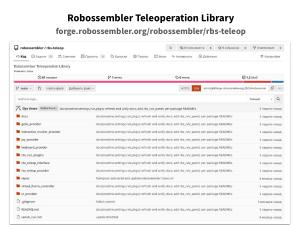
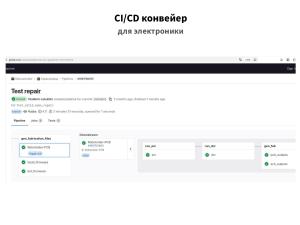
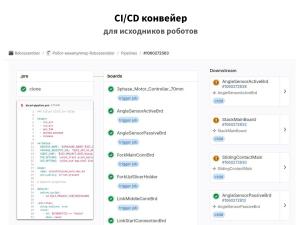
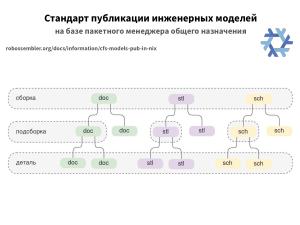
В рамках проекта Robossembler был развёрнут экспериментальный CI/CD-конвейер для автоматизации генерации производственных файлов печатных плат с использованием проекта KiBot. Для 3D-моделей пришлось ограничиться тем, что параллельно исходному файлу проекта изделия в репозиторий размещается STEP-файл, который в дальнейшем преобразовывается в набор полигональных моделей в форматах STL, OBJ для симуляции и производства. Также был разработан экспериментальный стандарт для применения пакетного менеджера общего назначения Nix для управления зависимостями и контроля версий моделей киберфизических систем.
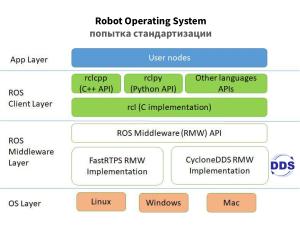
Перспективы развития связываются также с проектом ROS (Robot Operating System), где предприняты попытки стандартизации в области робототехники: форматы описания роботов (URDF, robot-description), middleware (DDS, Zenoh), системы сборки (colcon) и дистрибуции пакетов (ros_distro). Приобретение Open Robotics компанией Google создаёт новые возможности для развития экосистемы, но также и потенциальные риски.
Open Source Robotics в России: текущее состояние
Ситуация с открытой робототехникой в России неоднозначна, но обнадёживающая. Регулярно проводятся ROS Meetup, вокруг которого формируется сообщество — на данный момент количество участников насчитывает более 5000 человек. Появляются компании (Robossembler, VoltBro), открывающие чертежи, прошивки контроллеров и драйверы ROS.
С другой стороны, движение находится на начальной стадии. Его развитие может быть связано с общим контекстом российского open source, где исторически сильны сообщества вокруг ОС (ALT Linux, Astra Linux, ROSA). Дополнительным фактором развития может являться движение DIY (англ.: «Do It Yourself») и его комплементарность менталитету многих россиян.
!.jpg)