Среда КУМИР для изучения алгоритмов управления сенсорными сетями роботов (Виктор Воронин, OSEDUCONF-2013) — различия между версиями
Материал из 0x1.tv
StasFomin (обсуждение | вклад) |
StasFomin (обсуждение | вклад) |
||
== Примечания и отзывы ==
<!-- <blockquote>[©]</blockquote> -->
<references/>
[[Category:OSEDUCONF-2013]]
[[Category:Кумир]]
[[Category:Open-source projects]]
[[Категория:Робототехника]]
<!-- topub -->
{{stats|disqus_comments=0|refresh_time=2019-2020-01-04T16:12-30T15:40:57:05.206592213|vimeo_comments=0|vimeo_plays=130|youtube_comments=0|youtube_plays=23}} | |||
Версия 13:12, 4 января 2020
Содержание
Аннотация
- Докладчик
- Игорь Воронин


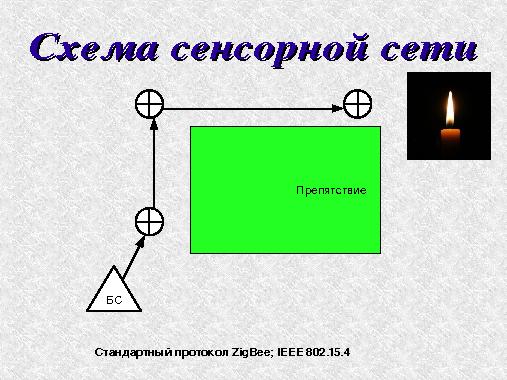
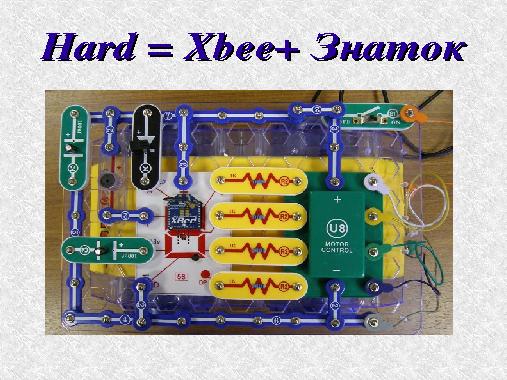
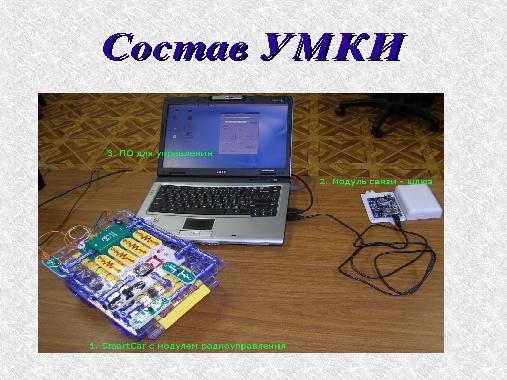
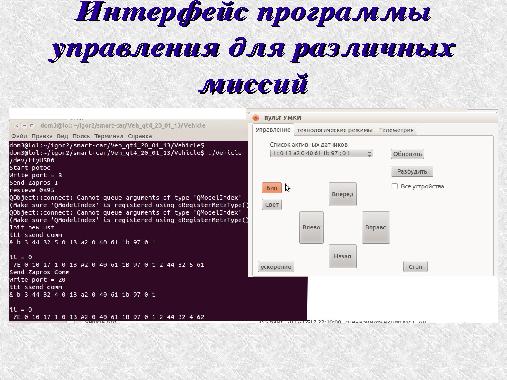
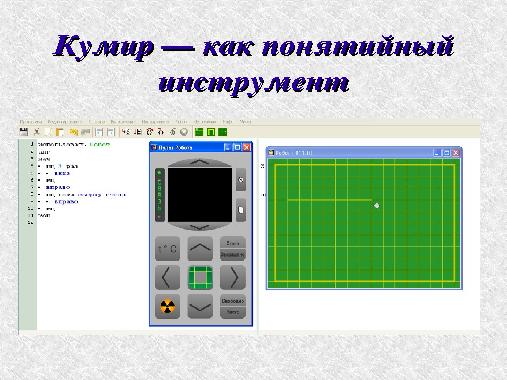
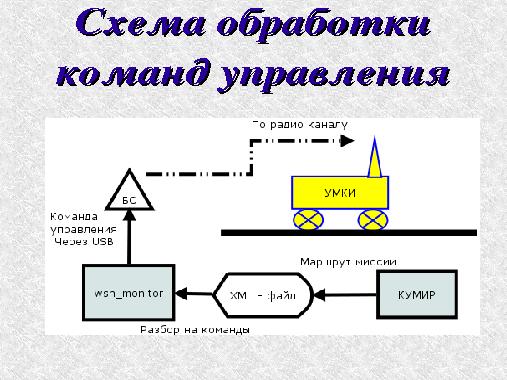
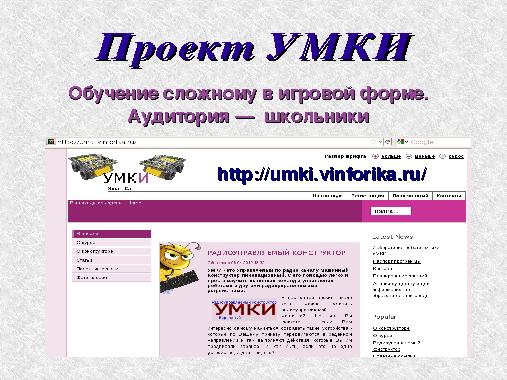
В данной работе обсуждаются вопросы обучения на основе использования среды КУМИР базовым алгоритмам управления и дистанционной связи множества разнообразных устройств в единую сенсорную сеть. Приводятся примеры выполнения различных миссий , при помощи которых в игровой и увлекательной форме происходит обучение базовым навыкам программирования и управления различными роботизированными передвижными комплексами. Проект УМКИ основан на СПО, использование в нем программной среды КУМИР увеличивает наглядность и повышает удобство в обучении программированию передвижных роботизированных платформ.
Видео
Посмотрели доклад? Понравился? Напишите комментарий! Не согласны? Тем более напишите.
Слайды






Примечания и отзывы
Plays:153 Comments:0