Иерархический каркас для алгоритмов задачи анализа движения объектов (Денис Степанов, SECR-2014) — различия между версиями
Материал из 0x1.tv
StasFomin (обсуждение | вклад) (Batch edit: replace PCRE \{\{youtubelink\|([^\}]*)\}\} with {{youtubelink|\1}}{{letscomment}}) |
StasFomin (обсуждение | вклад) |
||
== Примечания и отзывы ==
<!-- <blockquote>[©]</blockquote> -->
* [http://2014.secr.ru/lang/ru/program/submitted-presentations/hierarchical-framework-for-target-motion-analysis-algorithms Страница доклада на сайте конференции]
<references/>
<!-- -->
[[Категория:SECR-2014]]
[[Категория:Machine Learning]]
[[Категория:Алгоритмы]]
{{stats|disqus_comments=1|refresh_time=2018-10-11T00:27:0419T21:40:56.556070374723|vimeo_comments=0|vimeo_plays=12|youtube_comments=0|youtube_plays=14}} | |||
Версия 18:40, 19 октября 2018
Содержание
Аннотация
- Докладчик
- Денис Степанов


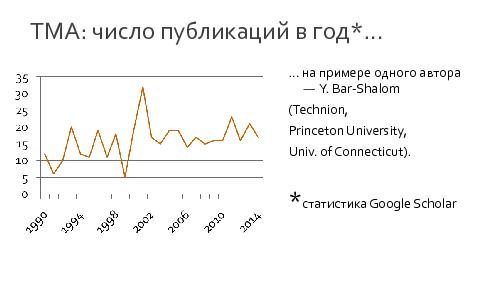
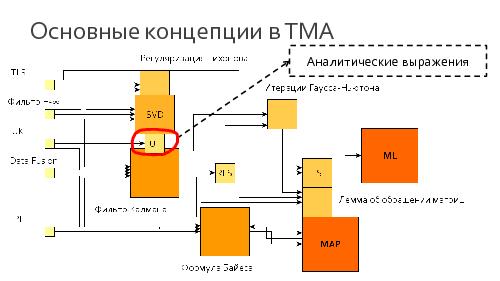
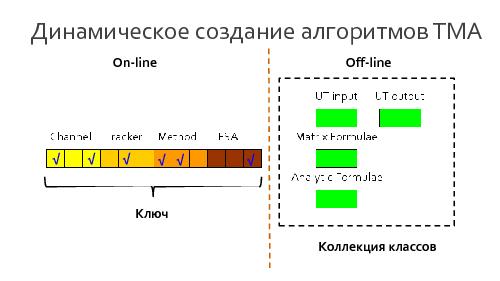
Постоянно появляются новые алгоритмы обработки данных, которые хотелось бы сравнить, но нет времени реализовывать? Возможно, эти алгоритмы не так новы, как кажется. Выделим паттерны в математических алгоритмах, соберем мета-алгоритм, получим интересующие алгоритмы как частные случаи.
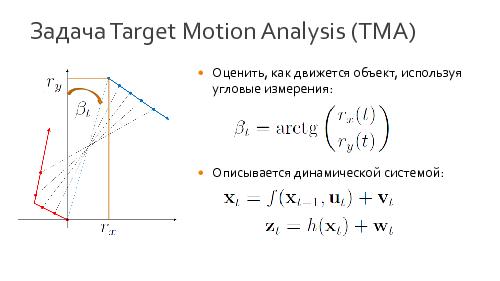
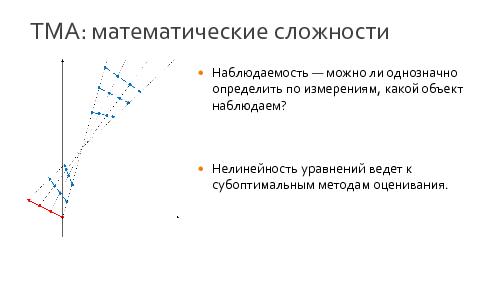
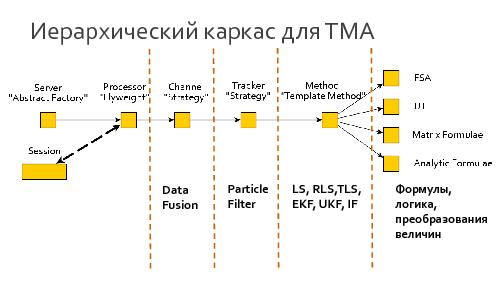
В докладе описывается опыт создания иерархического каркаса для динамического создания алгоритмов оценки параметров движущихся объектов (Target Motion Analysis).
Видео
Посмотрели доклад? Понравился? Напишите комментарий! Не согласны? Тем более напишите.
Слайды
Примечания и отзывы
Plays:26
Comments:1