Kotlin для роботов — это функционально! (Роман Белков, SECR-2015) — различия между версиями
Материал из 0x1.tv
StasFomin (обсуждение | вклад) |
StasFomin (обсуждение | вклад) |
||
== Примечания и отзывы ==
<!-- <blockquote>[©]</blockquote> -->
* [http://2015.secr.ru/lang/ru/program/submitted-presentations/kotlin-for-robotics-it-is-functional Страница доклада на сайте конференции]
{{fblink|1659919920927689}}
<references/>
[[Category:SECR-2015]] <!-- -->
[[Категория:Робототехника]]
[[Category:Kotlin]]
{{stats|disqus_comments=0|refresh_time=2018-05-15T14:14:19.808311|vimeo_comments=0|vimeo_plays=147|youtube_comments=0|youtube_plays=140}} | |||
Версия 08:01, 4 июня 2018
Содержание
Аннотация
- Докладчик
- Роман Белков


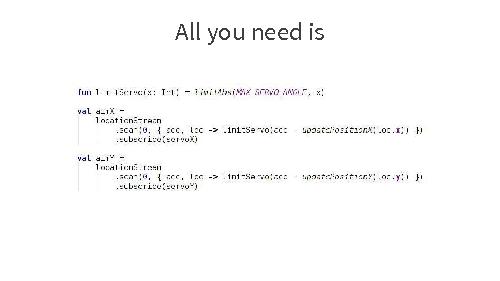
В докладе представлен опыт по дизайну библиотеки на языке Kotlin для JVM (Java 8 SE Embedded for ARM) на робототехническом контроллере TRIK. Будет рассказано о создании библиотеки, ориентированной на программирование роботов и устройств эры “Интернета вещей”, полностью написанной на Kotlin для использования с JVM-кодом на контроллерах.
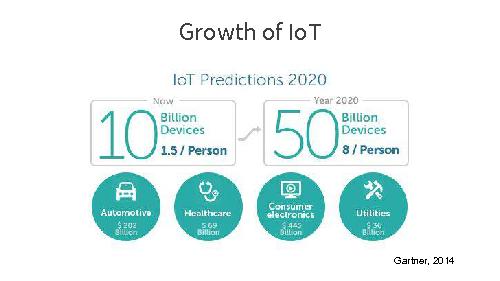
Думаю, слушателям было бы интересно узнать о том, как внедрение популярных высокоуровневых технологий, изначально не предназначенных для робототехники, открывает новые возможности как для разработчиков устройств, так и для использования в образовании.
Видео
Слайды




Примечания и отзывы
Plays:287 Comments:0