Функциональное реактивное программирование: от естественного пользовательского интерфейса к естественному поведению робототехники — различия между версиями
Материал из 0x1.tv
StasFomin (обсуждение | вклад) |
StasFomin (обсуждение | вклад) |
||
<references/>
<!-- -->
<!-- topub -->
[[Категория:SECR-2014]]
[[Категория:Fsharp]]
[[Категория:NUI]]
[[Категория:Робототехника]]
[[Категория:.NET]]
{{stats|disqus_comments=0|refresh_time=2017-11-10T23:54:06.92333824T19:39:35.318604|youtube_plays=115|vimeo_plays=119|youtube_comments=0|}}vimeo_comments=0}} | |||
Версия 16:39, 24 ноября 2017
Содержание
Аннотация
- Докладчик
- Дмитрий Сошников


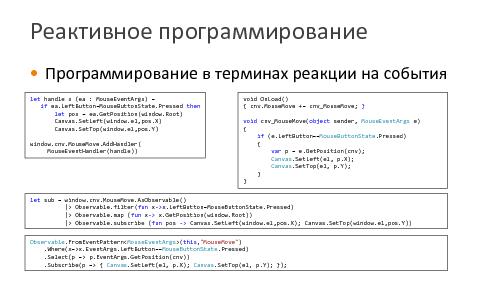
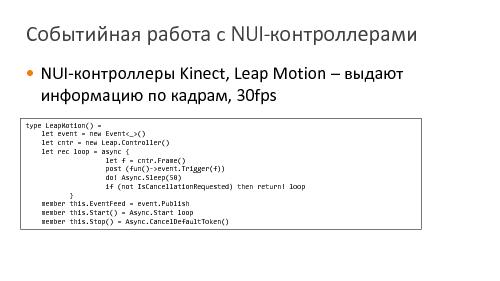
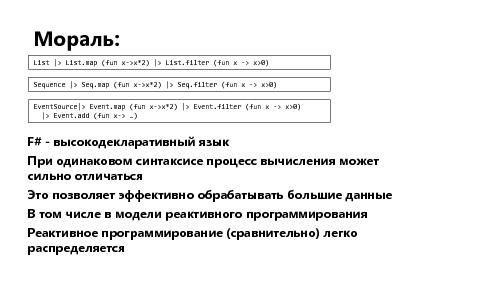
В этом докладе мы рассматриваем использование приёмов реактивного функционального программирования в F#.
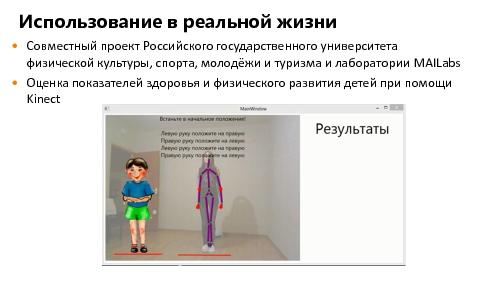
Мы поделимся нашим опытом в использовании этих приёмов для разработки естественного пользовательского интерфейса, основанного на датчиках движения Kinect и Leap Motion, и для управления набором инструментов робототехники ТРИК, и опишем проект робота, контролируемого жестами.
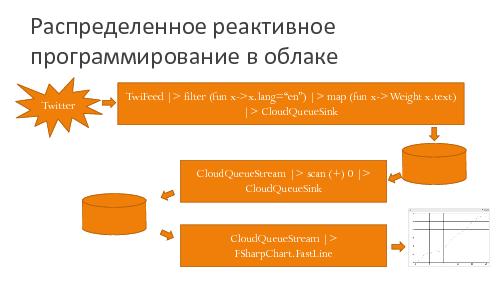
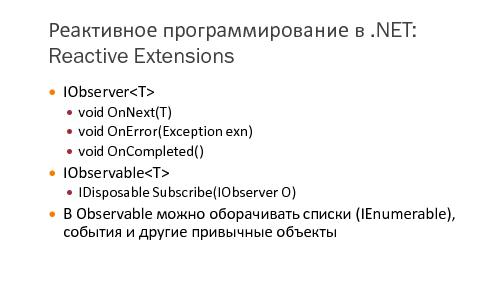
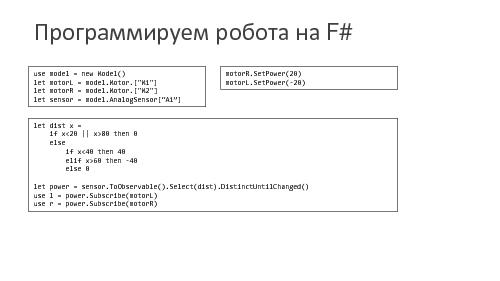
Мы продемонстрируем как реактивное функциональное программирование может быть внедрено на самые разные платформы, используя язык F#, и как потоки событий могут раздвигать границы изолированной системы в распределённой среде.
Видео
Слайды





Примечания и отзывы
Plays:234
Comments:0