Функциональное реактивное программирование: от естественного пользовательского интерфейса к естественному поведению робототехники — различия между версиями
Материал из 0x1.tv
StasFomin (обсуждение | вклад) (Batch edit: remove Category:ToPublish) |
StasFomin (обсуждение | вклад) (Batch edit: replace .secr.ru/program/ with .secr.ru/lang/ru/program/) |
||
== Примечания и отзывы ==
<!-- <blockquote>[©]</blockquote> -->
* [http://2014.secr.ru/lang/ru/program/submitted-presentations/functional-reactive-programming-from-natural-user-interface-to-natural-robotics-behavior Страница доклада на сайте конференции]
<references/>
[[Category:SECR-2014]] <!-- -->
<!-- topub --> | |||
Версия 22:24, 7 марта 2016
Содержание
Аннотация
- Докладчик
- Дмитрий Сошников


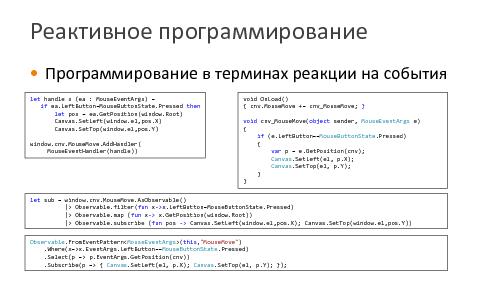
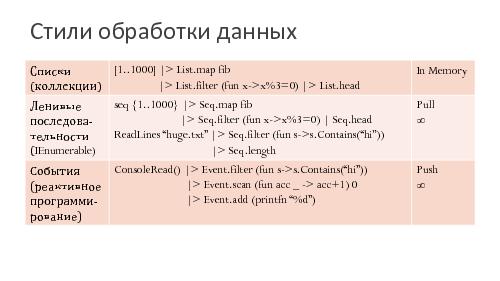
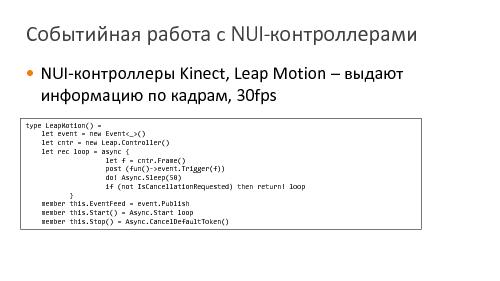
В этом докладе мы рассматриваем использование приёмов реактивного функционального программирования в F#.
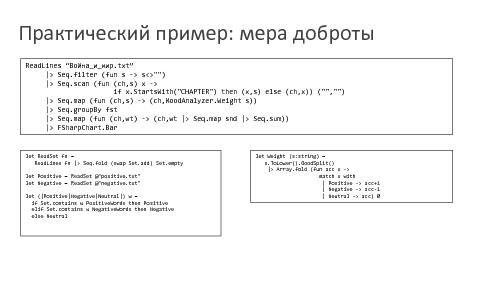
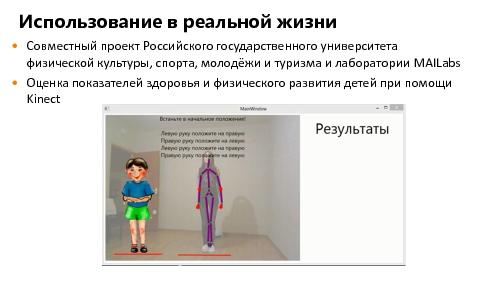
Мы поделимся нашим опытом в использовании этих приёмов для разработки естественного пользовательского интерфейса, основанного на датчиках движения Kinect и Leap Motion, и для управления набором инструментов робототехники ТРИК, и опишем проект робота, контролируемого жестами.
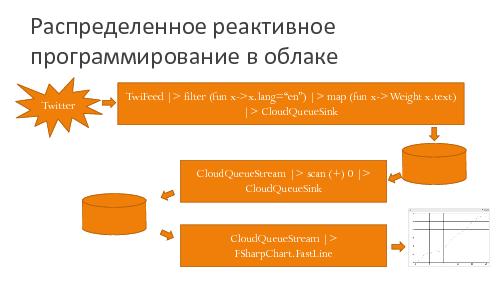
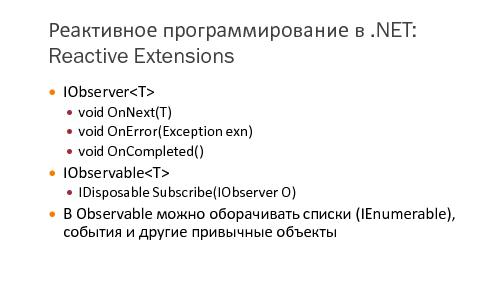
Мы продемонстрируем как реактивное функциональное программирование может быть внедрено на самые разные платформы, используя язык F#, и как потоки событий могут раздвигать границы изолированной системы в распределённой среде.
Видео
Слайды





Примечания и отзывы