Библиотека для разработки алгоритмов SLAM в ROS (Дмитрий Карташов, SECR-2016) — различия между версиями
Материал из 0x1.tv
StasFomin (обсуждение | вклад) |
StasFomin (обсуждение | вклад) |
||
{{LinksSection}}
* {{ConferencePage|http://2016.secr.ru/program/submitted-presentations/a-slam-research-framework-for-ros}}
<!-- <blockquote>[©]</blockquote> -->
{{fblink|1823583231228023}}
{{vklink|372}}
<references/>
<!-- topub -->
[[Категория:SECR-2016]]
{{stats|disqus_comments=1|refresh_time=2019-12-30T22:04:09-06T14:40:06.238405.609462|vimeo_comments=0|vimeo_plays=58|youtube_comments=0|youtube_plays=73}}107}} | |||
Версия 19:04, 30 декабря 2019
- Докладчик
- Дмитрий Карташов


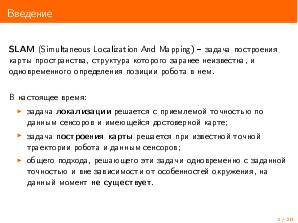
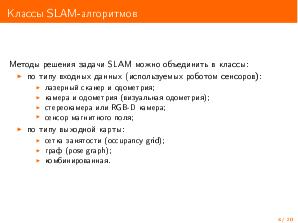
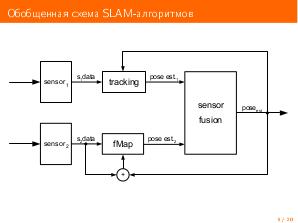
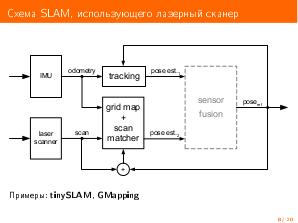
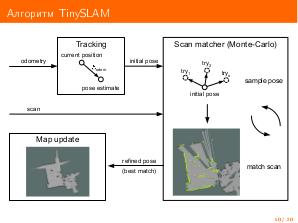
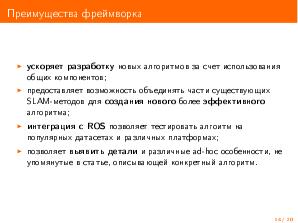
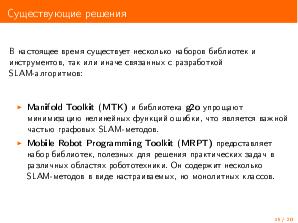
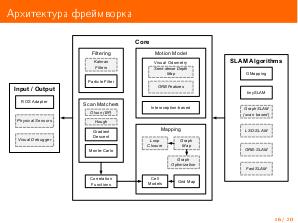
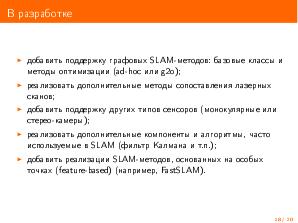
В настоящее время в открытом доступе нет библиотек, предоставляющих набор общих компонентов для ускорения разработки и исследования алгоритмов SLAM. Статья описывает находящуюся в разработке библиотеку, которая предоставляет набор компонентов, упрощающих создание SLAM-методов, основанных на обработке данных лазерного сканера. Для подтверждения удобства использования этой библиотеки в статье описана реализация с ее помощью алгоритмов tinySLAM и GMapping.
Доклад рассчитан на пользователей Robot Operating System, заинтересованных в разработке алгоритмов SLAM. Слушатели узнают о разрабатываемом фреймворке, который предназначен для ускорения разработки и тестирования этих алгоритмов.
Видео
Посмотрели доклад? Понравился? Напишите комментарий! Не согласны? Тем более напишите.
Презентация



!.jpg)
Примечания и ссылки
Plays:165 Comments:1