Реализация алгоритмов навигации БПЛА с использованием ROS (Илья Никляев, SECR-2015)
Материал из 0x1.tv
Короткая ссылка: 20151022EE
Содержание
Аннотация
- Докладчик
- Илья Никляев


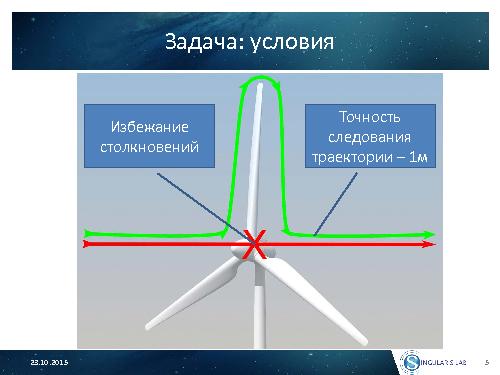
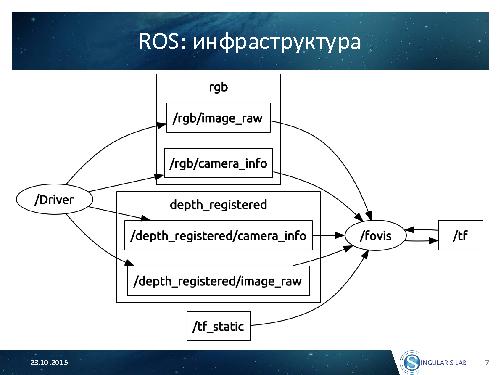
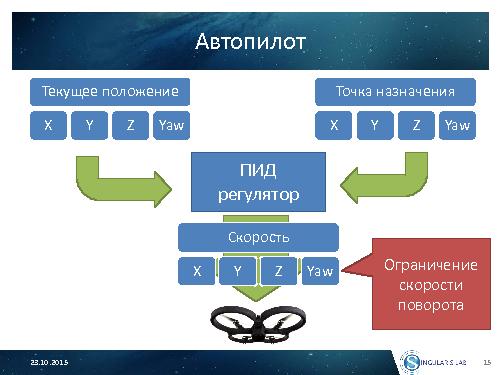
В рамках данного доклада освещается подход к разработке программного обеспечения роботов с использованием фреймворка ROS на примере алгоритмов навигации беспилотного летательного аппарата. Несмотря на то, что парадигма программирования под ROS несколько отличается от классических подходов к программированию, она набирает всё большую популярность среди разработчиков программного обеспечения роботов.
Видео
Слайды



Примечания и отзывы
Plays:336
Comments:3