Исследование нейродинамических систем непрерывного адаптивного управления (Владимир Судаков, ISPRASOPEN-2019)
Материал из 0x1.tv
- Докладчик
- Владимир Судаков


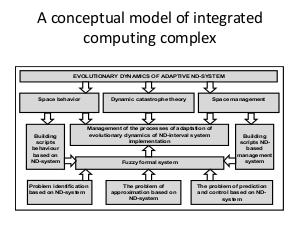
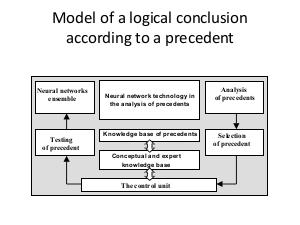
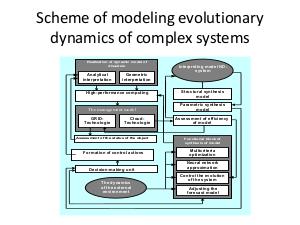
A formal mathematical formulation of the problem of control and prediction of dynamic object behavior in interaction with the environment based on a neurodynamic system was proposed. Such point of view allowed us to consider from the system positions the conceptual schemes of building an integrated complex of multiprocessor computer learning environment of an interpreting neurodynamic system of continuous adaptive control of complex dynamic objects at the stages of their life cycle.
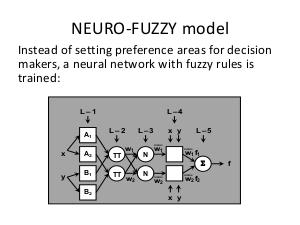
The basis of methodological support are the principles of system analysis, dynamic catastrophe theory, methods and technologies of neuro-fuzzy and neuroevolutionary modeling, which allows formalizing the procedures of processing and interpretation of information about the environment and physical experiment data based on the achievements of modern intelligent technologies and high-performance computing.
Видео
Посмотрели доклад? Понравился? Напишите комментарий! Не согласны? Тем более напишите.
Презентация
!.jpg)