Образовательная робототехника УМКИ на основе АЛЬТ в Зимней школе (Игорь Воронин, OSEDUCONF-2017)
Материал из 0x1.tv
Содержание
Аннотация
- Докладчик
- Игорь Воронин


Обсуждается опыт проведения зимней школы ФИЗТЕХ-Потенциал для учеников старших классов, как изучение свойств физических объектов и сравнении их с виртуальными. Учащиеся проводили физические эксперименты, загружали наборы «сырых» данных от Интернет Вещей, обрабатывали и получали координаты перемещения мобильных роботов.
Видео
Посмотрели доклад? Понравился? Напишите комментарий! Не согласны? Тем более напишите.
Слайды











Тезисы
Зимние каникулы наступившего 2017 года, школьники могли провести их по разному: кто-то катался на лыжах и коньках, кто-то играл в компьютерные игры, или лежал на диване перед телевизором.
Для ребят, выбравших Зимнюю школу «Физтех-Потенциал» занятия были организованы следующем образом: первая пара — математика, вторая физика а третья информатика-робототехника.
Занятия по информатике-робототехнике, были ориентированы на учеников 9, 10 и 11 классов. Для курса была выбрана авторская программа В. Ворониной \url{http://umki.vinforika.ru/}
Курс начался с обзорной лекции включающей видео ролики о различных типах наземных, воздушных и подводных роботов, о способах их передвижения, и протоколах связи, которые используются для обмена телематическими данными.
После этого, с большим удовольствием, ребята просто погоняли роботов между препятствиями. При этом они узнали разницу между дискретным и непрерывным режимами управления роботами.
Дискретный режим — когда всякое передвижение робота фиксируется датчиком движения — энкодером и робот проезжает строго то расстояние, которое ему задано программой. А непрерывный, действует до тех пор, пока нажата клавиша на пульте управления.
Ребята зафиксировали в лабораторной тетради связь между импульсами от энкодера с дистанцией пройденного пути.
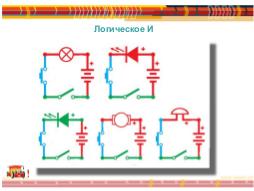
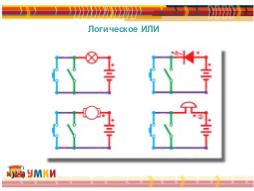
На второй день ребята вспомнили основы логики из школьного курса информатики и сами собрали из радио конструктора простейшие автоматы работающие на основе булевой алгебры.
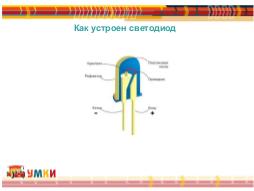
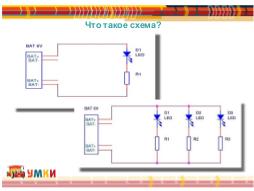
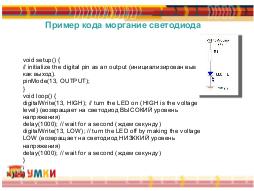
Следующее занятие с платами ардуино, предусматривало серию лабораторных опытов начиная с базовых тестовых примеров, таких как управление миганием светодиода и заканчивая построением прибора фиксирующего расстояние от платы до препятствия в соответствии с данными получаемыми от ультразвукового датчика. Теоретическая часть предусматривала знакомство с такими понятиями как ШИМ, как при помощи такой модуляции можно изменять окраску многоцветного светодиода с очень красивыми переливами. Участники Зимней школы научились пользоваться средой ArduinoIDE и разработали свои первые программы на языке Си.
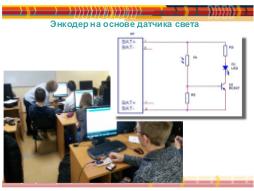
Далее, ребята продолжили знакомство с датчиками — собрали свой собственный энкодер: оптический или магнитный, по типу датчика Холла. Показания с энкодеров научились отправлять по радиопротоколу, для расчета скорости вращения колес робота.
В дальнейших экспериментах участникам пришлось вспомнить физику и по второму закону Ньютона ребята рассчитывали тягу электродвигателей, путем использования результатов автоматизированных замеров времени и длины пути из LOG-файла, который каждая группа сгенерила самостоятельно.
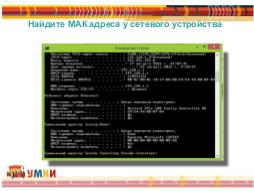
Поскольку реальные объекты отличаются от виртуальных, то следующим экспериментом было измерение угла поворота тележки робота в зависимости от заданных величин датчиков энкодеров. Работа проводилась в команде, когда один участник группы задавал энкодрами нужный диапазон величин и отправлял команду по радио эфиру на машинку, второй отмечал маркером пройденные точки пути и строил пересекающиеся прямые, а третий делал замеры углов и выполнял вычисления. Данные от робота поступали в шестнадцатеричной форме и для того чтобы правильно построить график было необходимо преобразовать их в десятичный формат. Полученные и обработанные результаты сводились в табличку, на основе которой делались выводы о различиях между виртуальным и реальным роботами.
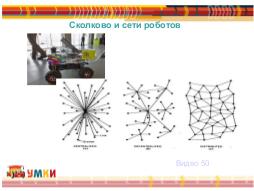
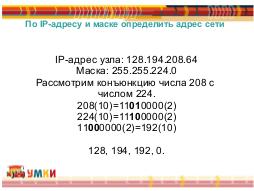
На четвертый день приступили к определению местоположения робота в пространстве, для чего строили виртуальные и реальные сетки координат, вычисляли ожидаемое место положение робота, а затем экспериментально отмечали реальное местонахождение на плоскости. И на основе полученных данных определяли погрешности. На будущее планируется осуществлять загрузку данных из лог файла в базу данных и путем сравнения значений в различных таблицах проводить анализ больших объемов данных, знакомясь с азами технологии data mining.
В завершающий день — участники зимней школы говорили о бизнесе, обсудили чем отличается фундаментальная наука от инновационной деятельности, обдумали как запустить свой стартап. После обзорной лекции про конечные автоматы ребята создали самостоятельно программу на языке Питон для обработки «сырых» данных полученных из ЛОГ файла, и по этим обработанным данным смогли создать облако точек с координатами перемещения робота по рабочему полю. Тем самым, ребята самостоятельно решали высокопрофессиональную задачу локализации — определения местоположения мобильного робота в заданном пространстве.
Дипломной работой каждого участника было оформление своего проекта, который можно показать в школе и использовать как заготовку для дальнейшего представления на научно-практической конференции.
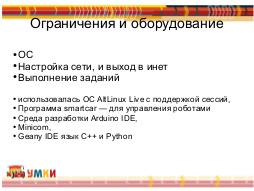
Программное обеспечение было целиком свободно распространяемое ПО. В данном случае использовалась ОС ALT Linux, среда разработки Arduino IDE, Geany IDE и программа для управления роботами smartcar, скачанная с сайта http://umkikit.ru, она может быть использована совершено бесплатно для любой операционной системы Linux, Windows, MacOs. Платы R5 с Arduino Nano, набором датчиков и светодиодов с уже распаянными сопротивлениями, были закуплены в магазине http://lartmaster.ru/.
Сами роботы связывались между собой по протоколу Zigbee. Для связи их с ПК использовались USB адаптеры. И роботы и USB адаптеры были закуплены через интернет магазин http://umkikit.ru/.
Примечания и отзывы
!.jpg)
Plays:50 Comments:0