Использование СПО в разработке учебных моделей систем определения местоположения объектов различных типов (OSEDUCONF-2023)
Материал из 0x1.tv
- Докладчик

Представлены системы определения местоположения объектов с различными отражающими способностями и свойствами.
Системы являются учебными проектами и служат для обучения робототехнике, электронике, программированию с использованием свободного программного обеспечения
Содержание
Видео
Презентация


Thesis
Изучение дисциплин профессионального цикла направлений подготовки «Управление в технических системах», «Информатика и вычислительная техника» и ряда других в обязательном порядке сопровождается получением студентами практических навыков разработки реальных аппаратно-программных средств.
Текущая обстановка в стране требует от студентов подготовленности к реальной проектной деятельности в перспективных направлениях по документу «Стратегия научно-технологического развития Российской Федерации»[1], п. 20 разд. а) — ж). Одним из примеров проектных разработок студенческого учебного уровня являются системы пеленгации (определения местоположения) разнообразных объектов. Для разработки таких систем применяются разнообразные датчики информации — видеокамеры, дальномеры различных типов, оптико-электронные блоки и т.д. Данные проекты в учебном отношении эффективны тем, что позволяют студентам: подключать несколько разнотипных датчиков информации; обрабатывать полученную информацию по самостоятельно созданным алгоритмам (включая нормирование данных, фильтрацию, отбрасывание ложных показаний, расчёты координат и т.д.); выводить информацию как на средства отображения информации, так и на другие информационные системы.
Представленные проекты используются для более крупных учебных проектов, например[2][3].
Изучение дисциплин профессионального цикла направлений подготовки «Управление в технических системах», «Информатика и вычислительная техника» и ряда других в обязательном порядке сопровождается получением студентами практических навыков разработки реальных аппаратно-программных средств.
Текущая обстановка в стране требует от студентов подготовленности к реальной проектной деятельности в перспективных направлениях по документу «Стратегия научно-технологического развития Российской Федерации»[1], п. 20 разд. а) — ж). Одним из примеров проектных разработок студенческого учебного уровня являются системы пеленгации (определения местоположения) разнообразных объектов. Для разработки таких систем применяются разнообразные датчики информации — видеокамеры, дальномеры различных типов, оптико-электронные блоки и т.д. Данные проекты в учебном отношении эффективны тем, что позволяют студентам: подключать несколько разнотипных датчиков информации; обрабатывать полученную информацию по самостоятельно созданным алгоритмам (включая нормирование данных, фильтрацию, отбрасывание ложных показаний, расчёты координат и т.д.); выводить информацию как на средства отображения информации, так и на другие информационные системы.
Представленные проекты используются для более крупных учебных проектов, например[2][3].
В данном материале представлены результаты проектирования нескольких учебных моделей систем определения местоположения объектов различных типов. Первая модель — определение углового местоположения объекта для осуществления азимутального наведения на объект[4]. Здесь решалась задача разработки системы управления макетом летательного аппарата с функциями: разворот по азимуту для автоматического наведения на объект — источник света; измерение дистанции до объекта. Здесь использовались сенсоры: фотоэлектрический сенсорный блок; ультразвуковые дальномеры; инфракрасные дальномеры. В качестве исполнительного устройства применялся серводвигатель. В ходе проектирования на начальном этапе студентами использовались САПР. Далее, на реальной конструкции решались практические проблемы: неустойчивость работы измерителей дистанции (шумы, выбросы), и ряд других. Для решения проблем применялись: экранирование проводников измерительного тракта; в программной части использована двухэтапная цифровая фильтрация. В итоге существенно снижена ошибка измерений и уменьшены выбросы. Макет доказал свою работоспособность и демонстрировался на днях открытых дверей нескольких вузов.
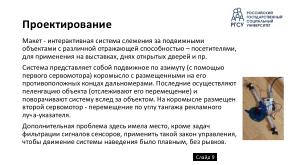
Ещё один действующий макет представляет собой интерактивную систему слежения за подвижными объектами с различной отражающей способностью — посетителями, для применения на выставках, днях открытых дверей и пр.
Система представляет собой подвижное (с помощью первого сервомотора — по азимуту) коромысло с размещёнными на его противоположных концах дальномерами. Указанные дальномеры осуществляют пеленгацию объекта (отслеживают его перемещение) и поворачивают систему вслед за объектом. На коромысле размещён второй сервомотор, осуществляющий перемещение по углу тангажа рекламного луча-указателя, который включается и выключается по случайному закону.
Дополнительная проблема здесь имела место, кроме задач фильтрации сигналов сенсоров, подобрать такой закон управления, чтобы движение системы наведения было плавным, без рывков. Данный макет также доказал свою работоспособность и был неоднократно применён на мероприятиях.
Использованное в настоящих разработках программное обеспечение относится к категории «свободное программное обеспечение», а именно язык Wiring. Применяемая платформа — Arduino.
В настоящее время создаётся прототип аналогичной установки на платформе Raspberry Pi с элементами машинного зрения.
Таким образом, представлены учебные модели систем определения местоположения объектов различных типов — активно излучающих источников света; пассивных объектов с различной отражающей способностью как для ультразвука, так и для оптического диапазона. Следует отметить, что студенты в ходе выполнения проектов в обязательном порядке оформляют отчётную и проектную документацию в соответствии с ГОСТ. Указанная проектная деятельность соответствует следующим компетенциям (ФГОС «Управление в технических системах»): «Готовность к участию в работах по изготовлению, отладке и сдаче в эксплуатацию средств автоматизации и управления»; «Готовность разрабатывать проектную документацию в соответствии с имеющимися стандартами»; «Готовность организовать метрологическое обеспечение производства средств автоматизации и управления».
Программный код разработки представлен здесь [1].
!.jpg)
Примечания и ссылки
- ↑ 1,0 1,1 Волохов Т. Д., Краулин Д. К., Кодирбердиев А. М. и др. Управление азимутальным наведением макета летательного аппарата. — Современные информационные технологии в образовании, науке и промышленности: XХIII Международная конференция, XХI
- ↑ 2,0 2,1 Волохов Т. Д., Краулин Д. К., Кодирбердиев А. М. и др. Управление азимутальным наведением макета летательного аппарата. — Современные информационные технологии в образовании, науке и промышленности: XХIII Международная конференция, XХI Международный конкурс научных и научно-методических работ: Сборник трудов / Отв. редактор и составитель Т.В. Пирязева. — М.: Изд-во «Экон-Информ», 2022. — 224 с. — Стр. 28-30. ISBN 978-5-907681-03-3.
- ↑ 3,0 3,1 Вепрева Е. Л., Махонина А. Н., Симонов В. Л. Разработка систем управления моделями наземных и воздушных беспилотных транспортных средств. — Современные информационные технологии в образовании, науке и промышленности: XХIII Международная конференция, XХI Международный конкурс научных и научно-методических работ: Сборник трудов / Отв. редактор и составитель Т.В. Пирязева. — М.: Изд-во «Экон-Информ», 2022. — 224 с. — Стр. 140-143. ISBN 978-5-907681-03-3.
- ↑ Симонов В. Л., Мякотина С. К., Гурский Г. И., Малькова А. О. Разработка системы управления макетом летательного аппарата с применением сенсоров. — 21-я Международная конференция «Авиация и космонавтика». 21-25 ноября 2022 года. Москва. Тезисы. — М.: Издательство «Перо», 2022– 8,06 Мб [Электронное издание]. — Стр. 262-263. ISBN 978-5-00204-819-9.